"GO Stanford" Dataset
"GO Stanford 1" (GS1), "GO Stanford 2" (GS2) and "GO Stanford 3" (GS3) are dataset of visual images from the view point of the mobile robot. These dataset are collected at the Stanford University campus.
Download "GO Stanford"
We open our dataset, "GO Stanford".
Whole Dataset
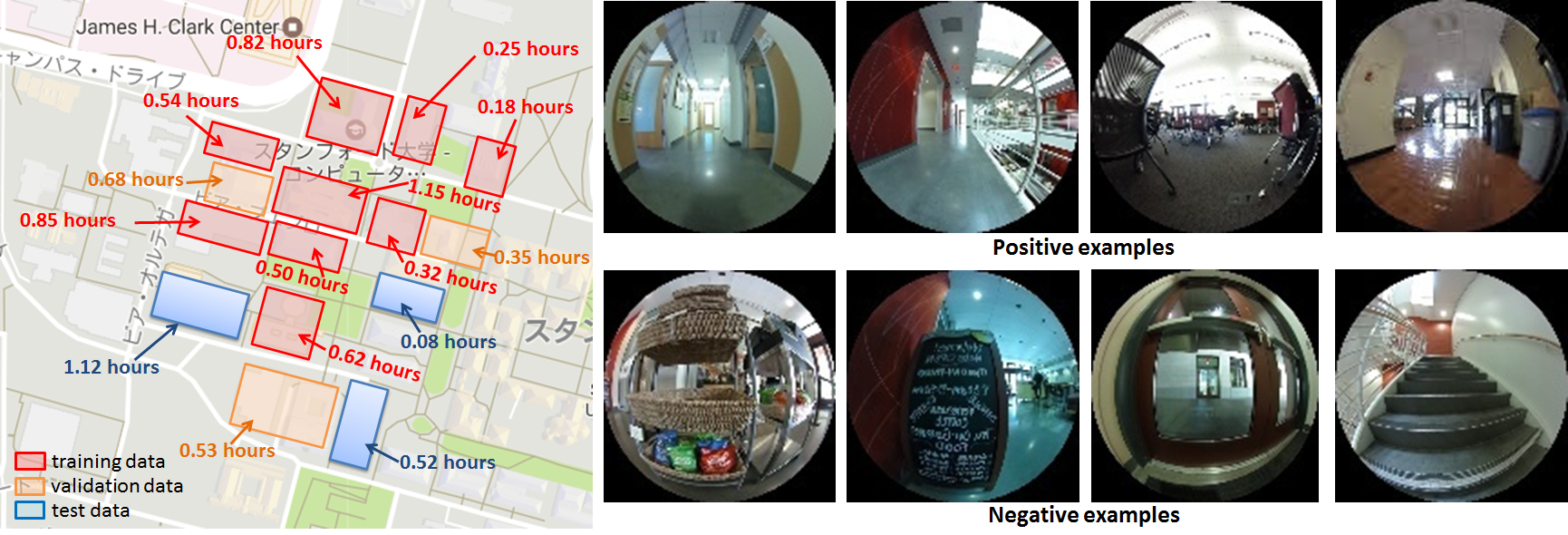
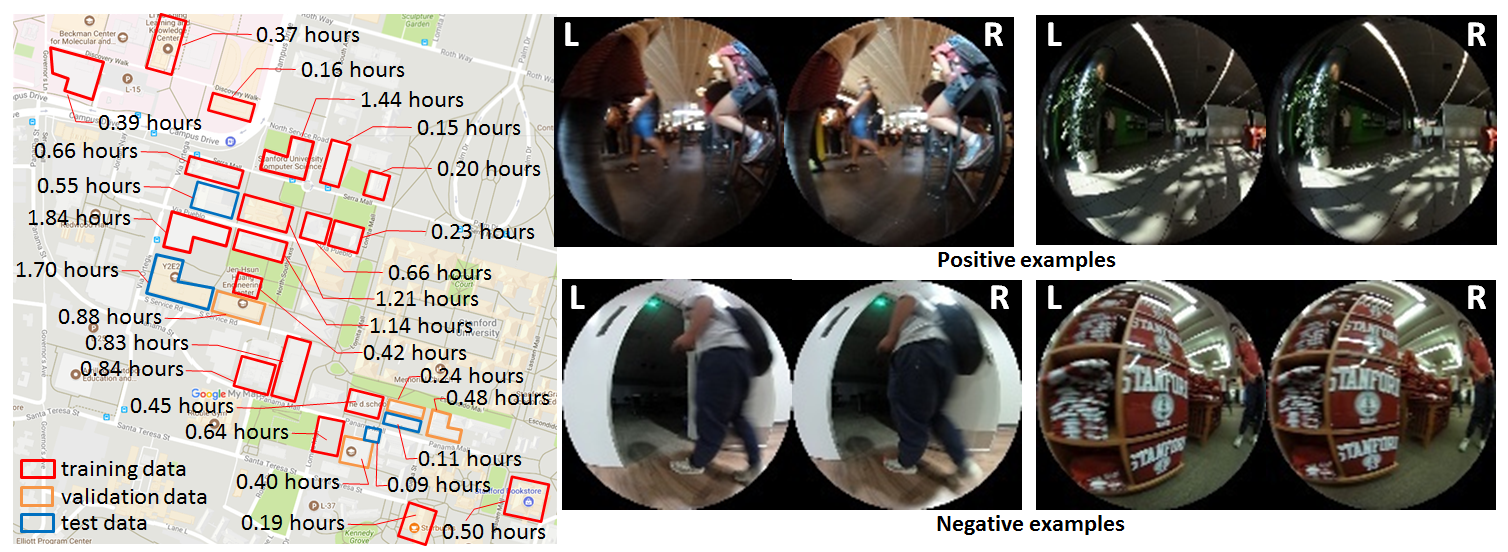
All collected images at 3 fps from the robot teleoperation can be divided into positive(traversable) images and unlabeled images. Annotation for the positive images are given from the threshold of the robot linear velocity. The detail is shown in our paper. Followings are the link to get our dataset "GO Stanford". In each training, test and validation dataset folder, there are 4 folders, "positive_L", "positive_R", "unlabel_L" and "unlabel_R", which indicate the label(positive or unlabel) and the camera position(left or right). And, the name of the image file is given as "img_buildX_Y_Z.jpg", where "X" indicates the building number, "Y" indicates the time order and "Z" indicates L(left) or R(right).
Training Data Test Data Validation Data
Hand-labeled Small Dataset
In addition to the above whole dataset, we provide small amount of hand-labled dataset. In our paper, we use them to train the classification layer to improve the accuracy. In each folder, there are 4 folders again for "positive_L", "positive_R", "negative_L" and "negative_R". And, the annotated image file is named as "img_A_B_C.jpg", where "A" indicates positive or negagive, "B" indicates L or R, and "C" indicates the identification number.
GO Stanford 1
We teleoperate the mobile robot and collect the fisheye camera images in 15 buildings. Total time length is 8.5 hours. The collected dataset includes not only images but also wheel encoder signals and joypad inputs.
Buildings
Hours
Labeled images
Images
GO Stanford 2
The collected dataset for "GO Stanford 2" is bigger and more informative. The dataset includes stereo vision of fisheye camera, KINECT(RGB-D), wheel encoder signals, and joypad inputs. Total time length is longer. And, the number of the building is bigger to contain the variety of the environment. "Go Stanford 2" is available from here.
Buildings
Hours
Labeled images
Images
License
The datasets provided on this page are published under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 License. This means that you must attribute the work in the manner specified by the authors, you may not use this work for commercial purposes and if you alter, transform, or build upon this work, you may distribute the resulting work only under the same license. If you are interested in commercial usage you can contact us for further options.