Overview
The Computational Vision and Geometry Lab (CVGL) at Stanford is directed by Prof. Silvio Savarese. Our research addresses the theoretical foundations and practical applications of computational vision. Our interest lies in discovering and proposing the fundamental principles, algorithms and implementations for solving high level visual recognition and reconstruction problems such as object and scene understanding as well as human behavior recognition in the complex 3D world.
Photo Gallery
Here are some highlights from our featured projects:
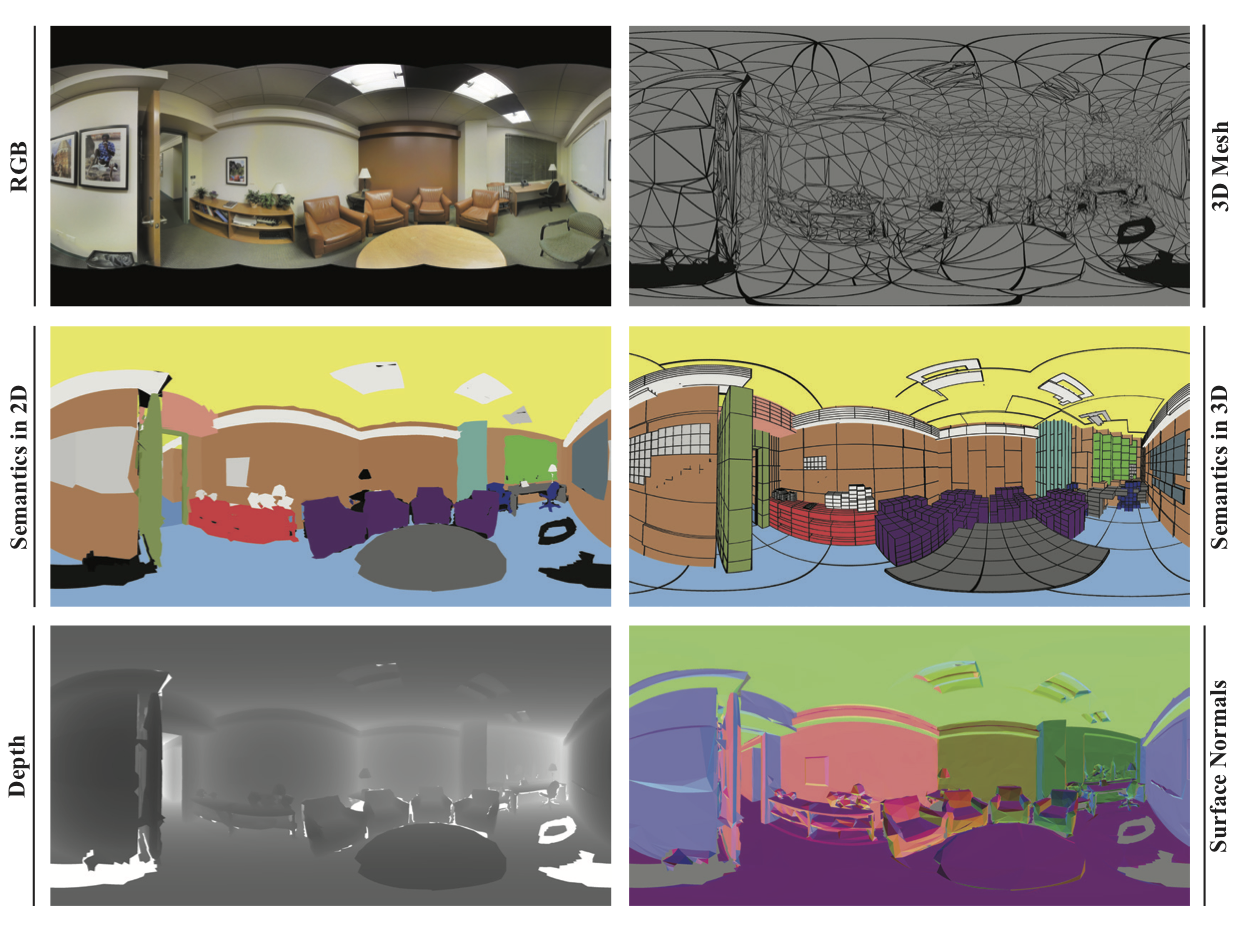
Joint 2D-3D-Semantic Data for Indoor Scene Understanding
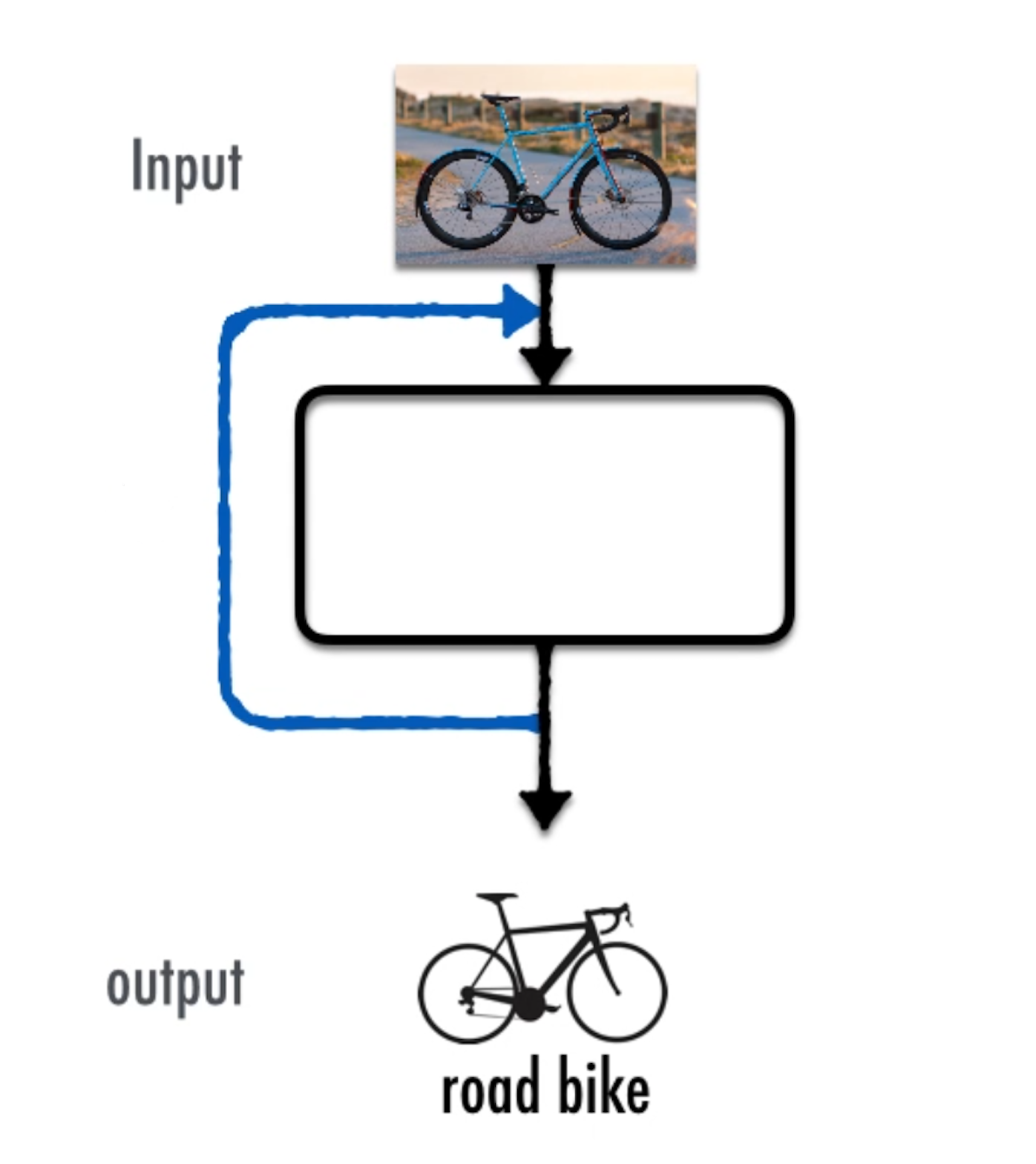
Feedback Networks
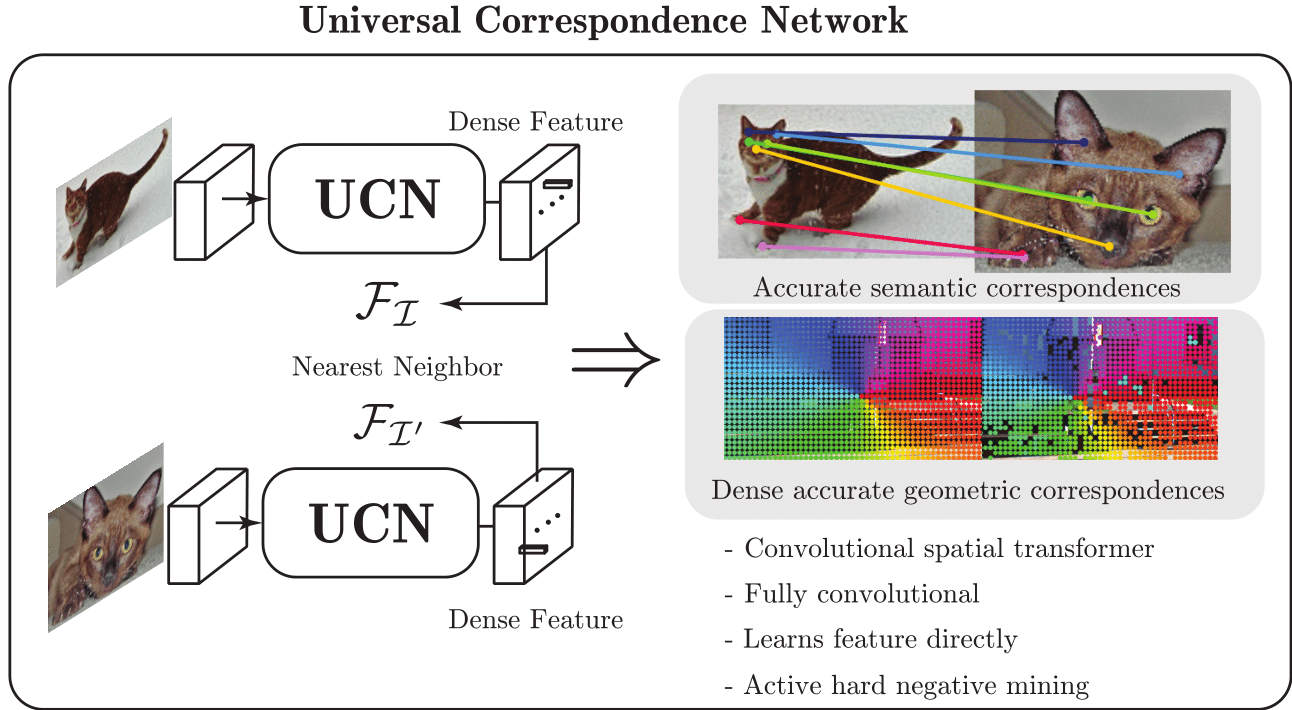
Univeral Correspondence Network
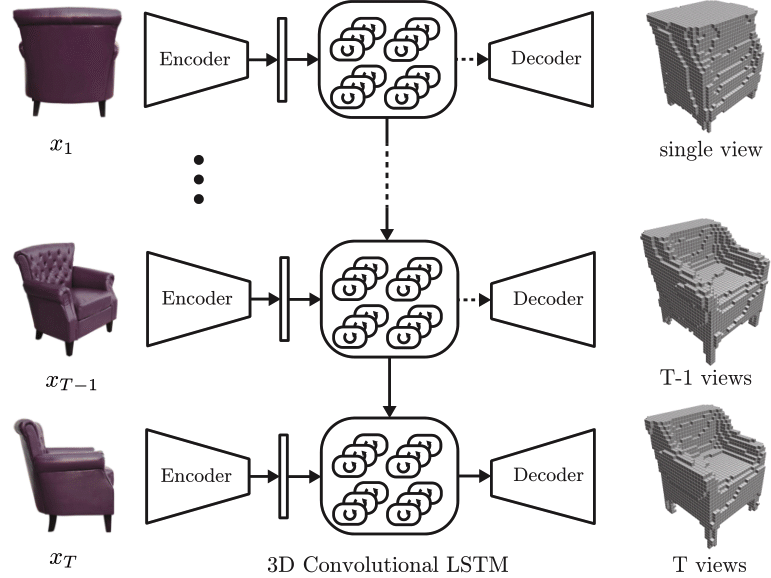
3D-R2N2
Recurrent Reconstruction Neural Network
Generic 3D Representation
Deep Metric Learning via Lifted Structured Feature Embedding
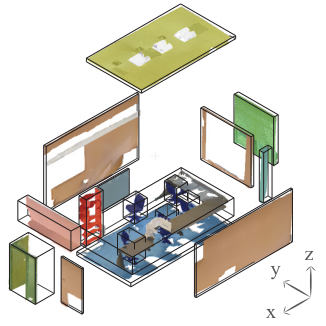
3D Semantic Parsing of Large-Scale Indoor Spaces
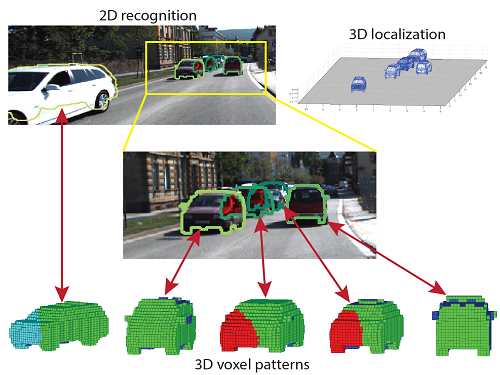
3D Voxel Patterns for Object Category Recognition
Contacts
Address
Computer Science Department, Stanford University
353 Serra Mall, Stanford, CA 94305-9025.
Admin: Tin Tin Wisniewski
Email: tintinyw at cs dot stanford dot edu, Phone: (650) 723-3819, Fax: (650) 725-1449